
As humanoid robots move closer to real-world deployment, one of the most difficult engineering challenges remains basic mobility: safely navigating complex environments designed for humans.
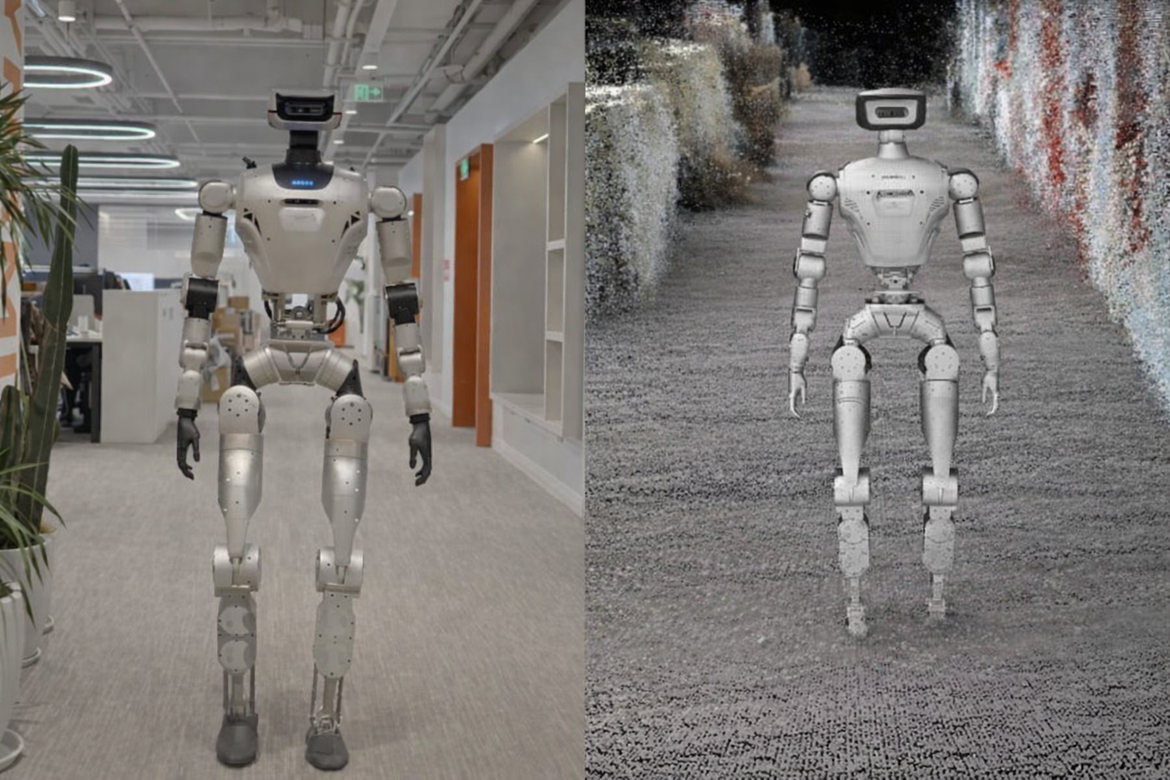
At NVIDIA’s GTC conference, RealSense demonstrated a perception system designed to address that problem, showing autonomous humanoid navigation developed in collaboration with Shenzhen-based robotics company LimX Dynamics. The system combines dense 3D depth sensing with visual simultaneous localization and mapping (vSLAM) to help legged robots understand and move through complex spaces.
The demonstration reflects a broader shift in robotics development. While much attention has focused on robot manipulation and artificial intelligence reasoning, reliable perception and navigation remain essential prerequisites for robots to operate safely alongside people.
RealSense CEO Nadav Orbach described the challenge as one of responsibility as much as technical capability. For robots working in human environments, perception systems must function as the machine’s “visual cortex”, enabling accurate localization, obstacle avoidance, and stable motion in constantly changing surroundings.
Why Humanoids Need a Different Navigation Stack
Navigation systems for traditional wheeled robots rely heavily on two-dimensional sensing and relatively predictable movement across flat surfaces. Technologies such as lidar and wheel odometry have proven effective for applications including robotic vacuums, warehouse robots, and autonomous carts.
Humanoid and legged robots introduce a more complex problem. Instead of moving along a fixed plane, they operate in three-dimensional space with shifting points of contact, uneven terrain, and dynamic obstacles.
Tasks such as stepping over objects, navigating stairs, or adjusting foot placement on irregular surfaces require far more detailed spatial awareness. Standard sensing systems used for wheeled robots often lack the full 3D context required for stable locomotion.
RealSense’s system addresses that gap using dense depth cameras that generate a detailed 3D understanding of the environment. Combined with visual SLAM algorithms and odometry data, the robot can continuously map its surroundings while tracking its own position.
The system demonstrated with LimX Dynamics integrates RealSense depth cameras with NVIDIA’s cuVSLAM technology, allowing the robot to localize itself and plan motion in real time.
Bridging Simulation and Real World Robotics
A key part of the project involved training and validating the navigation system in simulation before deploying it on a physical humanoid robot.
LimX Dynamics used NVIDIA Isaac Lab as a high-fidelity simulation environment where reinforcement learning models could practice locomotion and navigation behaviors. The simulated environment allowed engineers to test complex movement scenarios and refine control policies before transferring them to the physical robot.
This “simulation-first” approach is increasingly common in robotics development as companies attempt to close the gap between experimental demonstrations and reliable real-world performance.
By validating navigation behavior in simulation, developers can expose robots to a wide range of environments and edge cases that would be difficult or unsafe to reproduce physically.
In the case of humanoid robots, that includes scenarios such as uneven terrain, changing floor heights, or obstacles moving unpredictably through the robot’s path.
Perception as a Bottleneck for Humanoid Deployment
The demonstration highlights a broader challenge facing the emerging humanoid robotics industry.
While companies are making rapid progress in mechanical design and AI control systems, real-world deployment depends heavily on perception technologies capable of interpreting complex environments in real time.
Dense 3D sensing enables robots to identify hazards such as edges, stairs, and sudden elevation changes, reducing the risk of falls or unstable movements. It also allows robots to move in ways that appear more predictable and understandable to people sharing the same space.
As humanoids move from laboratory demonstrations to industrial or service environments, reliable perception may become one of the most critical components determining whether robots can safely operate in public settings.
RealSense, which was spun out from Intel in 2025, has been building depth sensing technologies for more than a decade. Its systems are already used across autonomous mobile robots, industrial automation, and healthcare devices.
The company’s latest demonstration suggests that the next phase of robotics development will depend not only on better robot bodies or smarter AI models, but also on perception systems capable of giving machines a stable and trustworthy understanding of the physical world.




