Siemens, NVIDIA and UK-based Humanoid have jointly deployed a humanoid robot inside a live manufacturing environment, marking one of the clearest signals yet that physical AI is moving beyond controlled demonstrations and into production settings.
The companies confirmed that Humanoid’s HMND 01 Alpha robot has been tested at a Siemens electronics factory in Erlangen, where it performed autonomous logistics tasks as part of ongoing operations. The deployment is part of a broader effort to build fully AI-driven, adaptive manufacturing systems.
While humanoid robots have been widely showcased in labs and pilot programs, this test stands out for meeting defined industrial performance thresholds in a real facility.
From Demonstration to Measurable Output
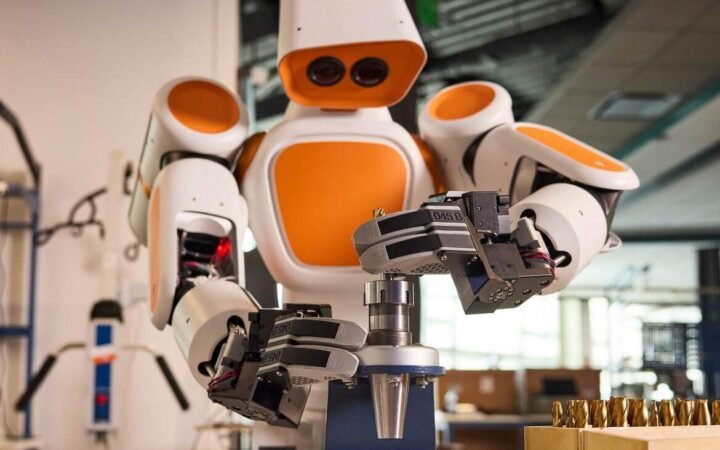
In the Erlangen deployment, the HMND 01 Alpha was assigned tote-handling tasks – picking, transporting, and placing containers within the factory workflow. According to the companies, the robot achieved throughput of around 60 operations per hour, maintained uptime beyond a full shift, and delivered pick-and-place success rates exceeding 90%.
These metrics place the system closer to practical utility than many earlier humanoid demonstrations, which have often focused on mobility or isolated manipulation tasks rather than sustained operational performance.
The robot’s design reflects this shift. Instead of a purely bipedal system, the HMND 01 uses a wheeled base combined with dual-arm manipulation, prioritizing stability and efficiency over human-like locomotion. This hybrid approach suggests that early industrial humanoids may diverge from human form where it improves performance.
The Stack Behind Physical AI
The deployment underscores the importance of integration across multiple layers of the robotics stack. While the robot itself executes tasks, its performance depends on a combination of simulation, AI models, and industrial control systems.
NVIDIA provides the underlying AI infrastructure, including edge computing hardware and simulation tools used to train and optimize the robot’s behavior before deployment. This “simulation-first” approach has significantly reduced development timelines, allowing the system to move from design to operational testing in months rather than years.
Siemens, meanwhile, contributes the industrial backbone through its Xcelerator platform, which connects the robot to factory systems, enabling real-time coordination with equipment, workflows, and human operators. Without this level of integration, even advanced robots would remain isolated within the production environment.
Together, these components form what the companies describe as a full-stack approach to physical AI – combining perception, reasoning, and execution within a unified operational framework.
A Path to Adaptive Manufacturing
The broader goal of the collaboration is to create factories that can adapt dynamically to changing conditions, rather than relying on fixed automation systems. In this model, robots are not programmed for single tasks but can be reassigned as production needs evolve.
This flexibility addresses a longstanding limitation in industrial automation, where reconfiguring production lines can be costly and time-consuming. By contrast, AI-driven systems can adjust workflows through software, reducing the need for physical reengineering.
The deployment also reflects a response to labor shortages and increasing operational complexity in manufacturing. Humanoid robots, particularly those capable of working in human-designed environments, are positioned as a way to augment existing workforces rather than replace them outright.
The Erlangen test does not yet represent large-scale adoption, but it demonstrates that humanoid robots can meet the performance and reliability thresholds required for real industrial tasks.
More broadly, it highlights a shift in how robotics is being deployed: not as standalone machines, but as part of integrated systems that combine AI, simulation, and industrial infrastructure.
As physical AI continues to mature, the question is less whether humanoid robots can operate in factories, and more how quickly these systems can scale across production networks.