
Boston Dynamics has published a detailed account of how its Atlas humanoid robot was trained to perform soccer drills for Hyundai Motor’s School of Football campaign, tied to the FIFA World Cup 2026. The technical process – spanning professional motion capture, motion retargeting, cloud-based reinforcement learning, and real-world policy transfer – is directly relevant to how Atlas learns industrial tasks, and the publication offers the most detailed public description Boston Dynamics has provided of its current training methodology.
The campaign culminates in Atlas executing the Ghost Rabona, a move combining a feint, a jump, and a cross-legged kick – a sequence that requires dynamic balance, coordinated whole-body control, and rapid momentum management.
Step One: Learning From Humans
The process began with a professional soccer player and a senior Boston Dynamics research engineer wearing optical motion capture suits – the same technology used in film and video game production. Their movements across a range of drills, from basic kicks and passes to the Ghost Rabona, generated a rich dataset of human motion. Rather than programming Atlas’s movements by hand, the team used these recordings as reference trajectories – effectively showing the robot what to do rather than specifying how to do it.
Step Two: Motion Retargeting
Direct replication of human motion is physically impossible for Atlas. Its joint ranges, limb proportions, and center of gravity differ fundamentally from a human body. A process called retargeting translates the captured human motion into equivalent movements that preserve the style and intention of the original action while conforming to Atlas’s specific kinematics. This step is the essential bridge between human demonstration and robotic execution.
Step Three: Reinforcement Learning at Scale
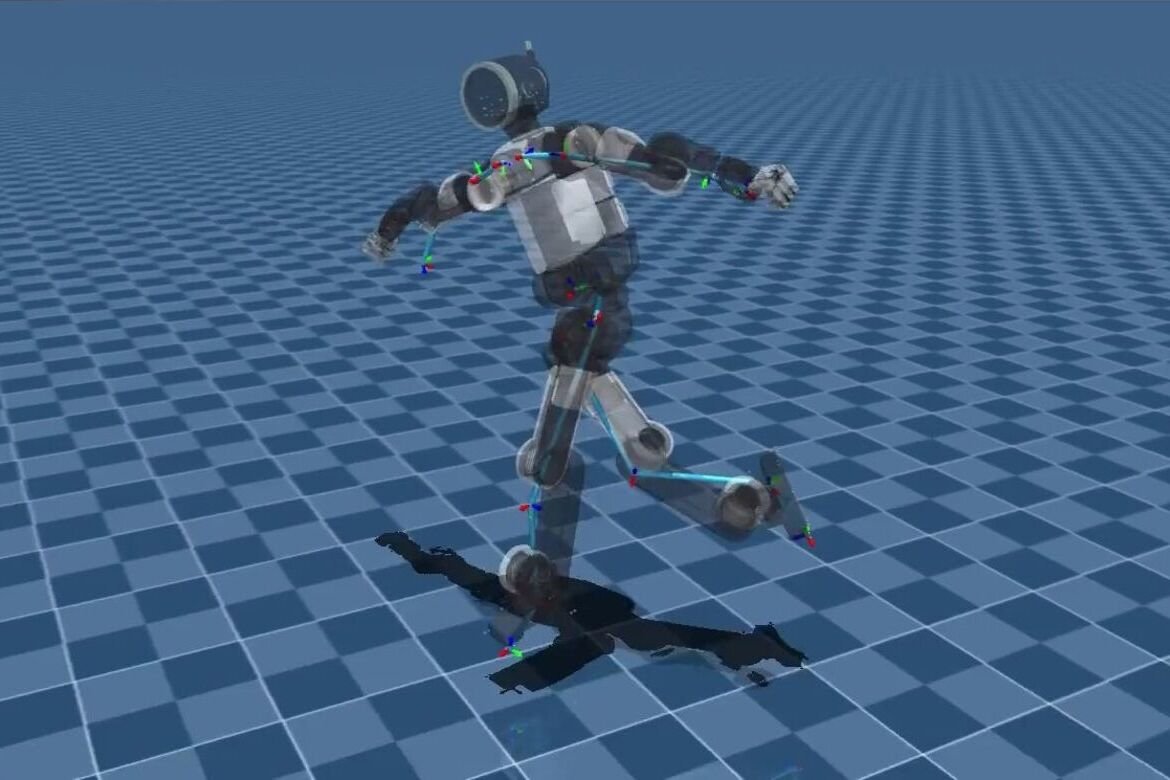
With retargeted reference trajectories established, Atlas learned through reinforcement learning in a cloud-based simulation environment. The system rewarded actions that successfully reproduced the retargeted motion while maintaining balance and control. By running thousands of parallel simulations on cloud GPUs, the team compressed what would be a year of physical trial and error into 24 hours of virtual training. The robot developed not just the motion itself but the underlying physics of how to achieve it – the precise motor controls, weight distribution, and forces required.
Step Four: Sim-to-Real Transfer
The resulting control policy was deployed on the physical Atlas robot after simulation training. The team reported that for nearly all of Atlas’s soccer skills, the policy worked correctly on the first physical attempt – a significant result given that sim-to-real transfer remains one of the most persistent challenges in robotics. Where minor errors occurred, the data was fed back into the training loop for continuous refinement.
Why Soccer, and Why It Matters for Industrial Use
The research team selected soccer as a training domain because it simultaneously demands balance, timing, coordination, and adaptation – four capabilities that must operate in concert rather than in isolation. Kicking a moving ball requires perceiving object location, repositioning, balancing on one leg, and executing a precisely timed strike, all in a dynamic sequence that cannot be pre-programmed.
The Ghost Rabona pushes those demands further: a feint, a jump, a landing, and an immediate powerful kick in rapid succession. Successfully executing it demonstrates whole-body coordination at a level that Boston Dynamics argues transfers directly to industrial applications – the same capabilities required to lift and carry objects in a warehouse, navigate cluttered factory floors, and perform complex manipulation tasks in assembly environments.
The training methodology documented in the School of Football campaign – motion capture from human demonstration, retargeting to robot kinematics, parallel reinforcement learning in simulation, and first-attempt real-world deployment – is the same pipeline Boston Dynamics is applying to Atlas’s industrial work at Hyundai and Kia manufacturing facilities.
Disclaimer: RobotsBeat is an independent media brand owned and operated by NuvexMedia LLC, publishing news, research, and insights on artificial intelligence, emerging technologies, automation, and related industries. NuvexMedia LLC invests in and collaborates with companies across the AI, Robotics, technology, software, and digital innovation sectors. These relationships do not influence RobotsBeat's editorial coverage, and the publication maintains full editorial independence to provide accurate, timely, and objective information. © 2026 NuvexMedia LLC. All rights reserved. This content is for informational purposes only and should not be considered legal, tax, investment, financial, or other professional advice.